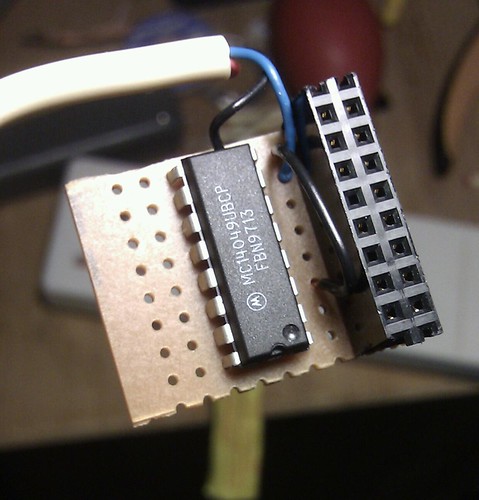
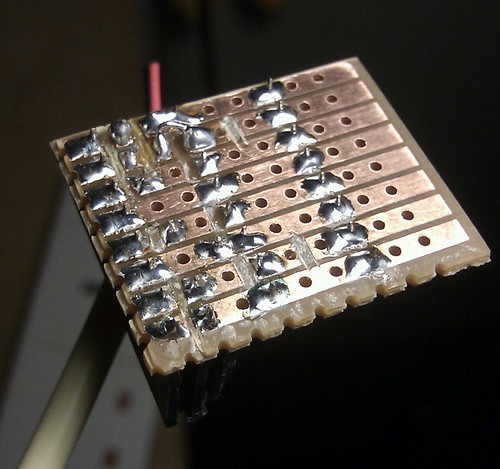
Having breadboarded it a couple of days ago, I’ve now finalized the serial interface between the Raspberry Pi and the Currentcost cc128, using some stripboard, dual header socket, CD4049, and a couple of bits of wire. Pretty straightforward; I removed a couple of pins from the header socket so I didn’t have to bridge from the outside of the socket back into the middle of the board, and made sure that all unused gates have their outputs floating and their inputs tied to something (in one case I’ve actually fed the input of a spare gate from the output fed to the rPi RX line; yes it will slightly increase the current consumption (as I’ve got an extra gate switching instead of staying static), but the effect will be tiny and it was easier than cutting the trace and fixing it all up with wires). The stripboard could have had the outer two rows of holes trimmed off but it doesn’t interfere with anything so I didn’t bother. The LEGO case has been improved now that I don’t have wires out the side (and has a transparent block near the LEDs on the rPi – works very well).



Machine is now under the bed driving the (USB) bedroom speakers using shairport and feeding power data to my main server over MQTT.
Leave a Reply